发布时间:2022-10-12
为保证工业机器人在生产中能够可靠地完成工序任务,在重复执行相同的动作时能保证工艺质量,工业机器人需要很高的定位精度和重复定位精度。因此,提高和确保工业机器人的精度就需要采用精密减速器。大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。在关节型机器人中,由于RV减速器具有更高的刚度和回转精度,一般将RV减速器放置在机座、大臂、肩部等重负载的位置,而将谐波减速器放置在小臂、腕部或手部。
谐波减速器
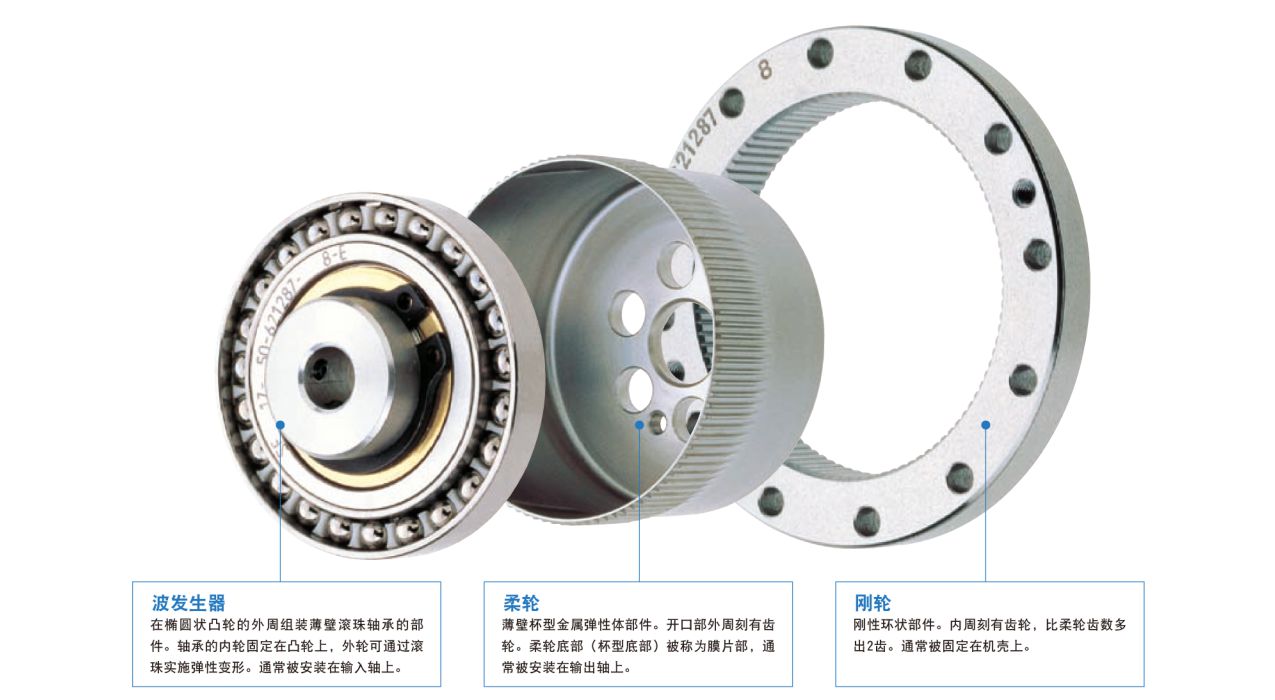
谐波减速机主要由波发生器、柔轮、刚轮三个基本构件组成,谐波传动减速器,是一种靠波发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。
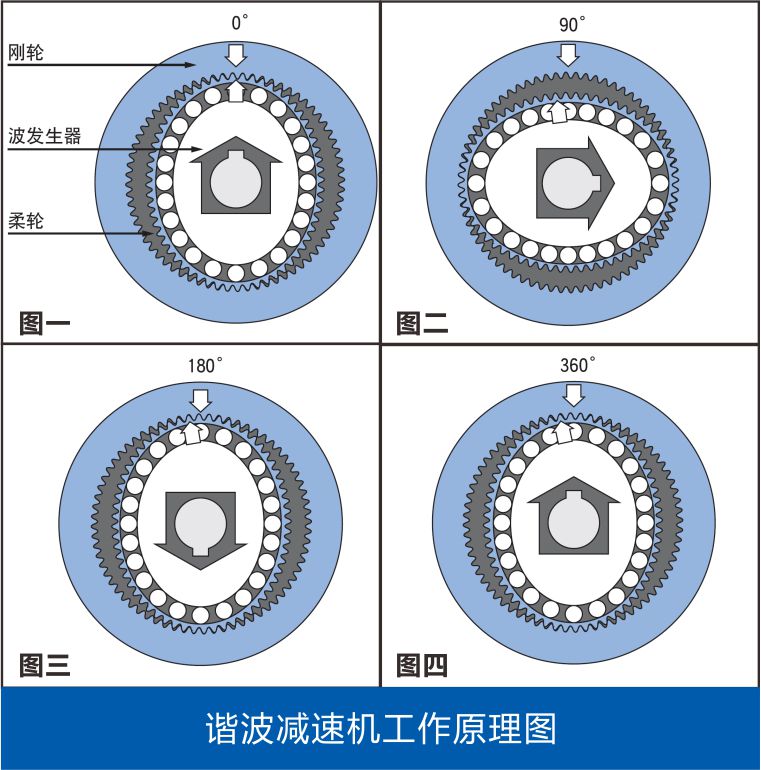
工作原理
柔轮被波发生器弯曲成椭圆状。因此,在长轴部分刚轮和齿轮啮合,在短轴部分则完全与齿轮呈脱离状态。如图一所示。
固定刚轮,使波发生器按顺时针方向旋转后,柔轮发生弹性形变,与刚轮啮合的齿轮位置顺次移动。如图二所示。
波发生器向顺时针方向旋转180度后,柔轮仅向逆时针方向移动一齿。如图三所示。
波发生器旋转一周(360度)后由于比刚轮减少2齿,因此柔轮向逆时针方向移动2齿。一般将该动作作为输出执行。如图四所示。
用途
谐波齿轮减速机在航空、航天、能源、航海、仿生机械、常用军械、机床、仪表、电子设备、工业机器人、精密机床、以及医疗器械等方面得到日益广泛的应用,特别是在高动态性能的伺服系统中,采用谐波齿轮传动更显示出其优越性。
特点
● 减速比高:单级同轴可获得1/30~1/320的高减速比。结构、构造简单,却能实现高减速比装置。
● 齿隙小:谐波减速器不同于与普通的齿轮啮合,齿隙极小,该特长对于控制器领域而言是不可或缺的要素。
● 精度高:多齿同时啮合,并且有两个180度对称的齿轮啮合,因此齿轮齿距误差和累积齿距误差对旋转精度的影响较为平均,使位置精度和旋转精度达到极高的水准。
● 零部件少、安装简便:三个基本零部件实现高减速比,而且它们都在同轴上,所以套件安装简便,造型简捷。
● 体积小、重量轻:与以往的齿轮装置相比,体积为1/3,重量为1/2,却能获得相同的转矩容量和减速比,实现小型轻量化。
● 转矩容量高:柔轮材料使用疲劳强度大的特殊钢。与普通的传动装置不同,同时啮合的齿数占总齿数的约30%,而且是面接触,因此使得每个齿轮所承受的压力变小,可获得很高的转矩容量。
● 效率高:轮齿啮合部位滑动甚小,减少了摩擦产生的动力损失,因此在获得高减速比的同时,得以维持高效率,并实现驱动马达的小型化。
● 噪音小:轮齿啮合周速低,传递运动力量平衡,因此运转安静,且振动极小。
寿命
减速机在额定状态下运行,寿命>6000 小时。不宜长时间在超过额定转速或额定转矩的情况下运行,否则寿命会降低。为保证减速机精度和寿命,请每隔2000 小时运行后更换油脂。
减速机构造图

 沪公网安备 31011702007878号
统计
沪公网安备 31011702007878号
统计