发布时间:2022-10-12
为保证工业机器人在生产中能够可靠地完成工序任务,在重复执行相同的动作时能保证工艺质量,工业机器人需要很高的定位精度和重复定位精度。因此,提高和确保工业机器人的精度就需要采用精密减速器。大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。在关节型机器人中,由于RV减速器具有更高的刚度和回转精度,一般将RV减速器放置在机座、大臂、肩部等重负载的位置,而将谐波减速器放置在小臂、腕部或手部。
RV减速器
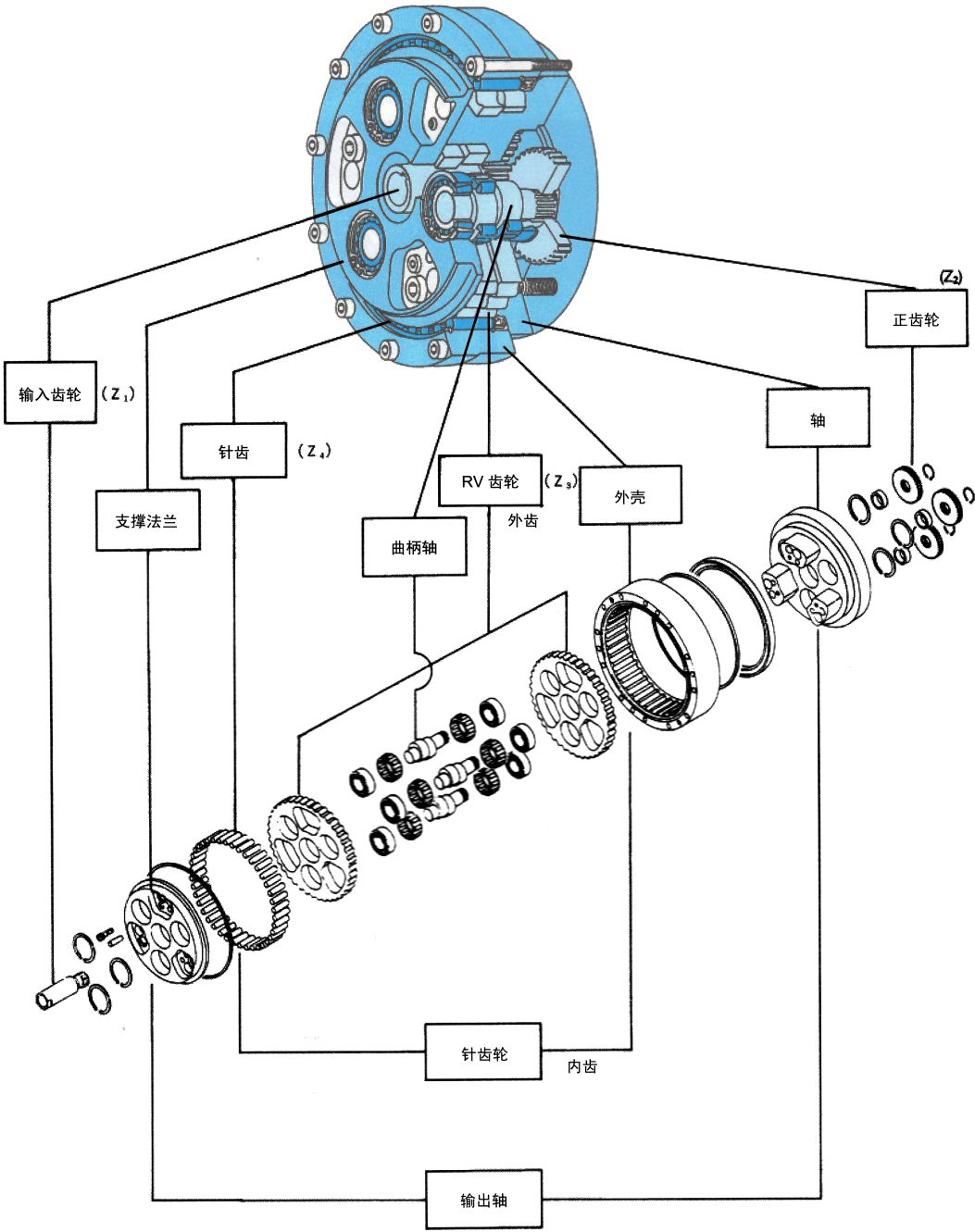
RV减速机是由渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构两部分构成。由于该减速机同时啮合齿轮数较多,所以具备小型、轻量特点的同时,也具有高刚性、耐过载的特点。另外,由于间隙、旋转振动、惯性小,所以具有良好的加速性能,可实现平稳运转并获取正确的位置精度。RV 减速机的核心部件为针齿壳、曲柄轴、摆线轮。
工作原理
渐开线行星齿轮与曲柄轴连成一体,作为摆线针轮传动部分的输入。曲柄轴带动摆线轮作偏心运动。曲柄轴向顺时针方向旋转1 周,摆线轮将沿逆时针方向移动1 个齿。
用途
工业机器人、外部轴、精密机床、雷达、医疗器械等高端智能装配行业
特点
齿隙小于1弧分;抗冲击性强;扭转刚度高;传动比范围大;传动效率高;工作寿命长等。
寿命
减速机在额定状态下运行,寿命>6000 小时。不宜长时间在超过额定转速或额定转矩的情况下运行,否则寿命会降低。为保证减速机精度和寿命,请每隔2000 小时运行后更换油脂。
齿隙与空程
回滞曲线:输入端固定,输出端施加转矩,得到转矩与扭转角的对应关系。
齿隙:回滞曲线上,转矩为“零”处的扭转角。
空程:回滞曲线上,转矩为“±3%额定转矩”处的扭转角
RV减速机构造图

 沪公网安备 31011702007878号
统计
沪公网安备 31011702007878号
统计